








ห้องปฏิบัติการ Kakogawa แห่งมหาวิทยาลัย Ritsumeikan กำลังพัฒนาเทคโนโลยีมือหุ่นยนต์สำหรับระบบอัตโนมัติในกระบวนการป้อนวัตถุดิบชนิดผงสำหรับอุตสาหกรรมอาหารและเคมีภัณฑ์
ในโรงงานผลิต กระบวนการชั่งตวงและป้อนวัตถุดิบชนิดผงยังคงพึ่งพาแรงงานคนเป็นจำนวนมาก ทำให้การลดการใช้แรงงานและการจ่ายวัตถุดิบในปริมาณคงที่ยังเป็นความท้าทายสำคัญ
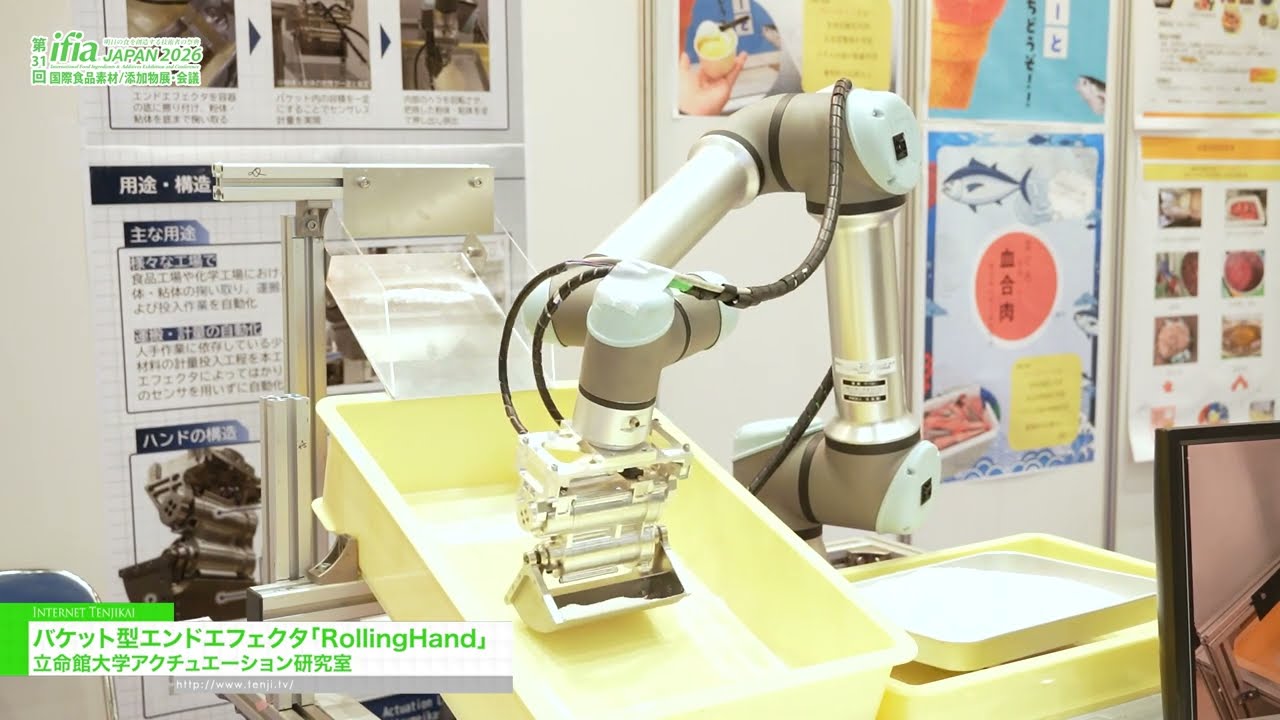
ห้องปฏิบัติการได้พัฒนาเอ็นด์เอฟเฟกเตอร์ที่ใช้โครงสร้าง Rolling Hand แบบยืดหยุ่น สามารถตักวัตถุดิบจากก้นภาชนะและหยิบจับในปริมาณคงที่ได้อย่างรวดเร็ว เพื่อเพิ่มประสิทธิภาพระบบอัตโนมัติในโรงงานอาหาร
ความท้าทายที่แก้ไข
กลุ่มลูกค้าเป้าหมาย
FAQ
จุดเด่นของ Rolling Hand คืออะไร?
เทคโนโลยีนี้เหมาะสำหรับการใช้งานประเภทใด?
แตกต่างจากวิธีการเดิมอย่างไร?
ดูคำบรรยายวิดีโอ
นี่คือห้องปฏิบัติการ Kakogawa แห่งมหาวิทยาลัย Ritsumeikan
เราได้พัฒนาเอ็นด์เอฟเฟกเตอร์ที่เรียกว่า Rolling Hand ซึ่งเป็นส่วนมือของหุ่นยนต์ที่ออกแบบมาเพื่อหยิบจับวัสดุชนิดผงในปริมาณคงที่สำหรับอุตสาหกรรมอาหาร และขอแนะนำเทคโนโลยีนี้ให้ทุกท่านได้รู้จัก
ปัจจุบัน กระบวนการป้อนวัตถุดิบในอุตสาหกรรมอาหารและเคมีภัณฑ์ โดยเฉพาะวัตถุดิบชนิดผง ยังคงต้องพึ่งพาแรงงานคนเป็นจำนวนมาก ดังนั้นเราจึงมุ่งพัฒนาระบบอัตโนมัติสำหรับงานเหล่านี้
คุณลักษณะสำคัญประการหนึ่งของระบบนี้คือสามารถตักวัสดุจากก้นภาชนะที่บรรจุผงได้
โดยทั่วไป หุ่นยนต์อุตสาหกรรมจะหลีกเลี่ยงการสัมผัสกับวัตถุเนื่องจากอาจเกิดความเสี่ยง แต่ Rolling Hand ที่เราพัฒนามีโครงสร้างยืดหยุ่น ทำให้สามารถสัมผัสและตักวัสดุจากก้นภาชนะได้
อีกหนึ่งคุณลักษณะคือความสามารถในการหยิบจับวัสดุในปริมาณคงที่ โดยใช้โครงสร้างลักษณะคล้ายถังที่กำหนดปริมาตร และมีการปาดผิวด้านบน คล้ายกับวิธีที่มนุษย์ใช้ช้อนตวงในการตักวัตถุดิบ
ระบบจะตักวัสดุ ปาดผิวให้เรียบ กำหนดปริมาณคงที่ และป้อนเข้าสู่เครื่องจักรแปรรูป
เมื่อเทียบกับระบบที่ใช้เครื่องชั่งสำหรับการชั่งตวง ระบบนี้สามารถดำเนินงานได้รวดเร็วยิ่งขึ้น
ปัจจุบันเรากำลังร่วมมือกับบริษัทสตาร์ทอัพที่ใช้ระบบลักษณะนี้สำหรับการชั่งตวงวัตถุดิบก่อนการจัดส่ง และกำลังพัฒนาเทคโนโลยีเพื่อการนำไปใช้เชิงพาณิชย์
หากท่านสนใจเทคโนโลยีหรือโครงการวิจัยนี้ กรุณาเยี่ยมชมเว็บไซต์ของ Kakogawa Laboratory ภายใต้ Actuation Laboratory ของมหาวิทยาลัย Ritsumeikan เพื่อดูข้อมูลการติดต่อ
ขอบคุณครับ
ติดต่อเรา