








리츠메이칸대학교 가코가와 연구실은 식품 및 화학 산업의 분체 투입 공정을 자동화하기 위한 로봇 핸드 기술을 개발하고 있다.
제조 현장에서는 분체 원료의 계량 및 투입 작업이 여전히 인력에 크게 의존하고 있어, 인력 절감과 정량 공급을 동시에 실현하는 것이 중요한 과제로 남아 있다.
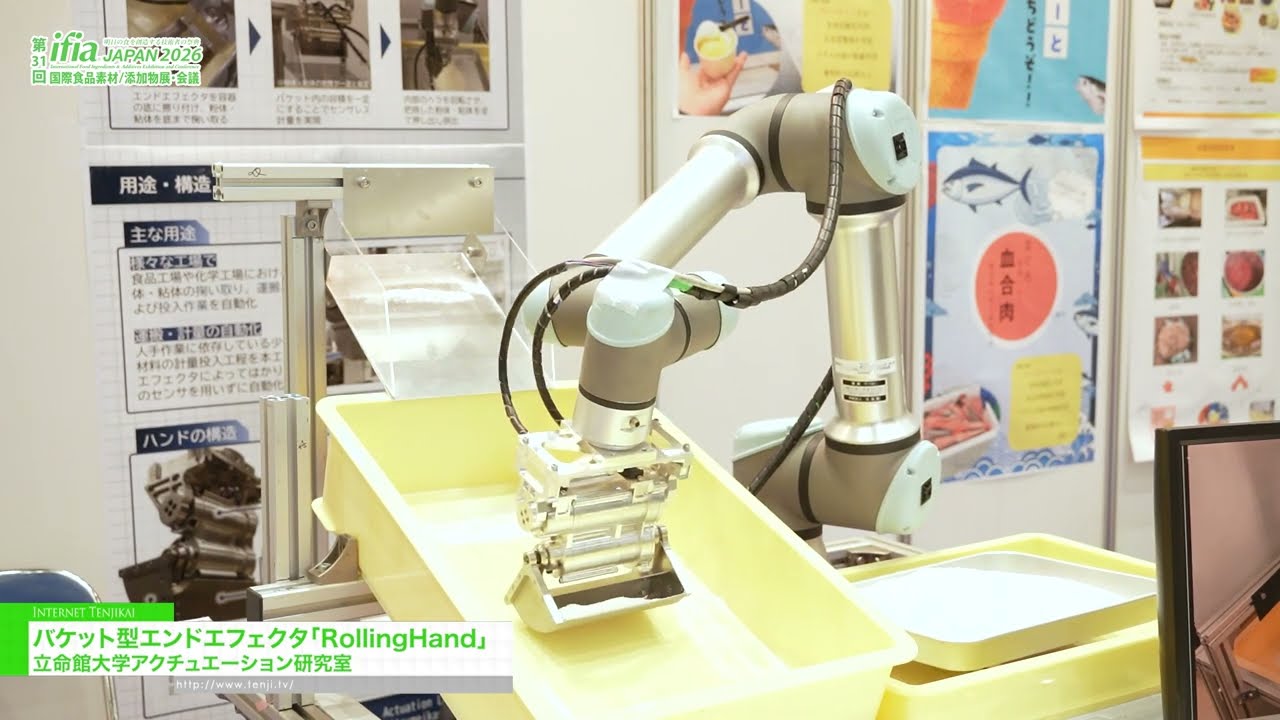
연구실은 유연성을 갖춘 Rolling Hand 구조를 적용한 엔드 이펙터를 개발했으며, 이를 통해 용기 바닥까지 분체를 떠올리면서도 일정한 양을 빠르게 취할 수 있도록 하여 식품 공장의 자동화 효율 향상을 목표로 하고 있다.
해결 과제
대상 고객
FAQ
Rolling Hand의 특징은 무엇입니까?
이 기술은 어떤 용도로 개발되었습니까?
기존 방식과 어떤 차이가 있습니까?
영상 자막 보기
저희는 리츠메이칸대학교 가코가와 연구실입니다.
이번에 Rolling Hand라고 불리는 엔드 이펙터를 개발했습니다. 이는 식품 산업에서 분체와 같은 원료를 일정량 취하기 위한 로봇 손 부분이며, 이에 대해 소개드리고자 합니다.
현재 식품 및 화학 산업에서 분체 원료를 투입하는 공정은 여전히 인력에 의존하는 경우가 많아, 이를 자동화하고자 연구를 진행하고 있습니다.
이 시스템의 특징 중 하나는 분체가 담긴 용기의 바닥까지 도달하여 원료를 떠올릴 수 있다는 점입니다.
기존 산업용 로봇은 물체와의 접촉을 위험 요소로 간주하여 최대한 피하는 것이 일반적이지만, 저희가 개발한 로봇 손은 유연성을 갖추고 있어 용기 바닥까지 접근할 수 있습니다.
또 다른 특징은 일정량을 취할 수 있다는 점입니다. 버킷 형태의 구조 내부 용적을 제한하고 위에서 평탄화하는 동작을 추가하여, 사람이 계량 스푼을 사용하는 방식에서 착안해 개발했습니다.
원료를 떠올린 뒤 평탄화하여 일정량을 취하고, 이를 가공 설비에 투입하는 방식입니다.
기존의 계량 장비를 사용하는 정량 계량 시스템과 비교하면 작업을 더욱 빠르게 완료할 수 있습니다.
현재는 이러한 시스템을 활용해 원료를 계량하고 출하하는 스타트업 기업과 공동 연구를 진행하고 있으며, 사업화를 목표로 개발을 추진하고 있습니다.
이 기술이나 연구에 관심이 있으시다면 리츠메이칸대학교 Actuation Laboratory 내 가코가와 연구실 홈페이지를 방문해 주시기 바랍니다. 연락처도 확인하실 수 있습니다.
감사합니다.
문의하기








