








Ritsumeikan University का Kakogawa Laboratory खाद्य एवं रासायनिक उद्योगों में पाउडर सामग्री फीडिंग प्रक्रियाओं के स्वचालन के लिए रोबोटिक हैंड तकनीक विकसित कर रहा है।
विनिर्माण स्थलों पर पाउडर कच्चे माल की माप और आपूर्ति प्रक्रियाएँ अभी भी काफी हद तक मानव श्रम पर निर्भर हैं, जिसके कारण श्रम बचत और निश्चित मात्रा की आपूर्ति को एक साथ प्राप्त करना एक महत्वपूर्ण चुनौती बना हुआ है।
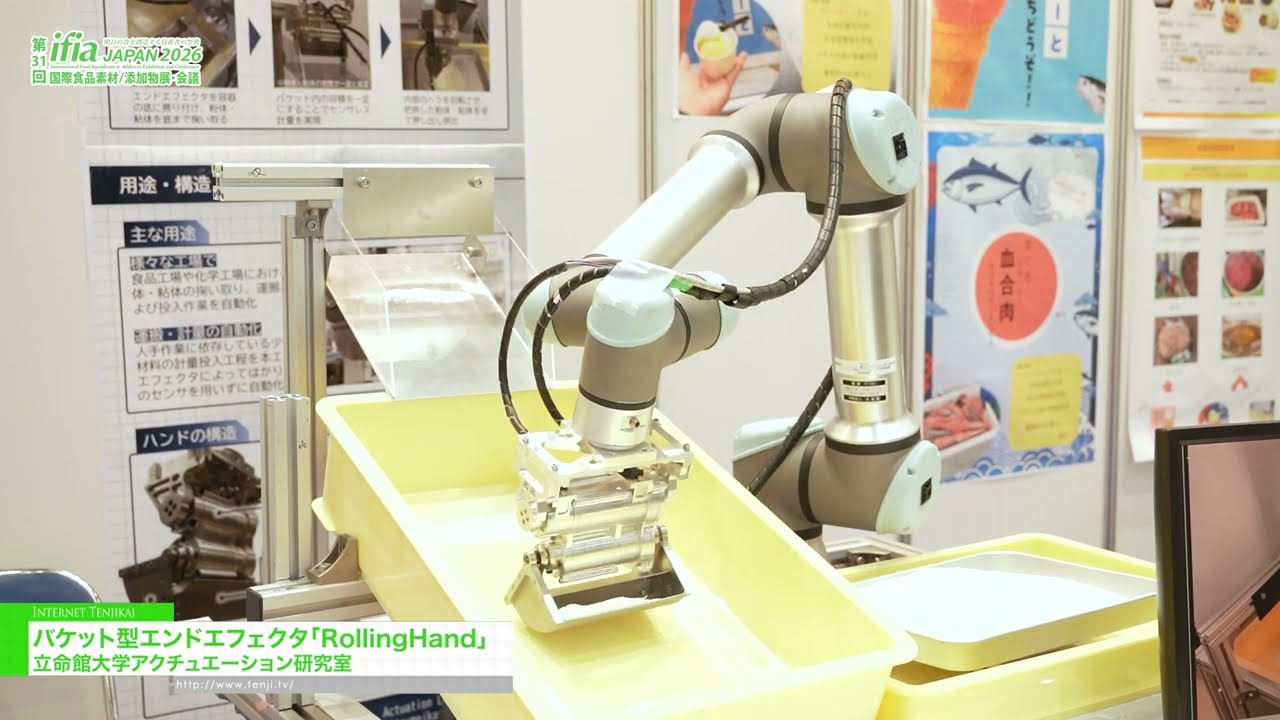
इस प्रयोगशाला ने Rolling Hand नामक एक लचीली संरचना पर आधारित एंड इफेक्टर विकसित किया है, जो कंटेनर के तल से सामग्री निकालने और तेज़ी से एक निश्चित मात्रा को पकड़ने में सक्षम है। इसका उद्देश्य खाद्य कारखानों में स्वचालन की दक्षता बढ़ाना है।
समाधान किए जाने वाले मुद्दे
लक्षित ग्राहक
FAQ
Rolling Hand की प्रमुख विशेषताएँ क्या हैं?
यह तकनीक किन अनुप्रयोगों के लिए विकसित की गई है?
यह पारंपरिक तरीकों से कैसे अलग है?
वीडियो प्रतिलेख देखें
हम Ritsumeikan University के Kakogawa Laboratory से हैं।
हमने Rolling Hand नामक एक एंड इफेक्टर विकसित किया है, जो रोबोट का हाथ वाला भाग है और खाद्य उद्योग में पाउडर सामग्री की निश्चित मात्रा को पकड़ने के लिए डिज़ाइन किया गया है। हम इस तकनीक का परिचय देना चाहते हैं।
वर्तमान में खाद्य और रासायनिक उद्योगों में कच्चे माल, विशेष रूप से पाउडर सामग्री, की आपूर्ति प्रक्रियाएँ अभी भी बड़े पैमाने पर मानव श्रम पर निर्भर हैं। इसलिए हम इन प्रक्रियाओं को स्वचालित बनाना चाहते हैं।
इस प्रणाली की एक विशेषता यह है कि यह पाउडर से भरे कंटेनर के तल तक पहुँचकर सामग्री निकाल सकती है।
पारंपरिक औद्योगिक रोबोट आमतौर पर वस्तुओं के संपर्क से बचते हैं क्योंकि इसे जोखिमपूर्ण माना जाता है। लेकिन हमारे द्वारा विकसित रोबोटिक हाथ में लचीली संरचना है, जो इसे कंटेनर के तल से सामग्री निकालने में सक्षम बनाती है।
एक अन्य विशेषता इसकी निश्चित मात्रा को पकड़ने की क्षमता है। बाल्टी जैसी संरचना के भीतर आयतन को सीमित करके और ऊपर से समतल करने की क्रिया जोड़कर हमने यह एंड इफेक्टर विकसित किया है, जो मनुष्यों द्वारा चम्मच से सामग्री लेने की प्रक्रिया से प्रेरित है।
सामग्री को निकाला जाता है, समतल किया जाता है, निश्चित मात्रा में लिया जाता है और फिर प्रसंस्करण उपकरण में डाला जाता है।
मात्रात्मक मापन के लिए उपयोग किए जाने वाले पारंपरिक तौल-आधारित सिस्टमों की तुलना में यह प्रणाली कार्य को अधिक तेज़ी से पूरा कर सकती है।
वर्तमान में हम एक स्टार्टअप कंपनी के साथ सहयोग कर रहे हैं जो इस प्रकार की प्रणाली का उपयोग शिपमेंट से पहले कच्चे माल के मापन के लिए करती है, और हम इसके व्यावसायीकरण की दिशा में विकास जारी रखे हुए हैं।
यदि आप इस तकनीक या इस पहल में रुचि रखते हैं, तो कृपया Ritsumeikan University के Actuation Laboratory के अंतर्गत Kakogawa Laboratory की वेबसाइट देखें, जहाँ संपर्क जानकारी उपलब्ध है।
धन्यवाद।
संपर्क करें