立命館大學加古川研究室正在開發用於食品與化工產業粉體投入製程自動化的機器人手部技術。
在製造現場,粉體原料的計量與投入作業仍有許多環節依賴人工操作,因此如何同時實現省人化與定量供給已成為重要課題。
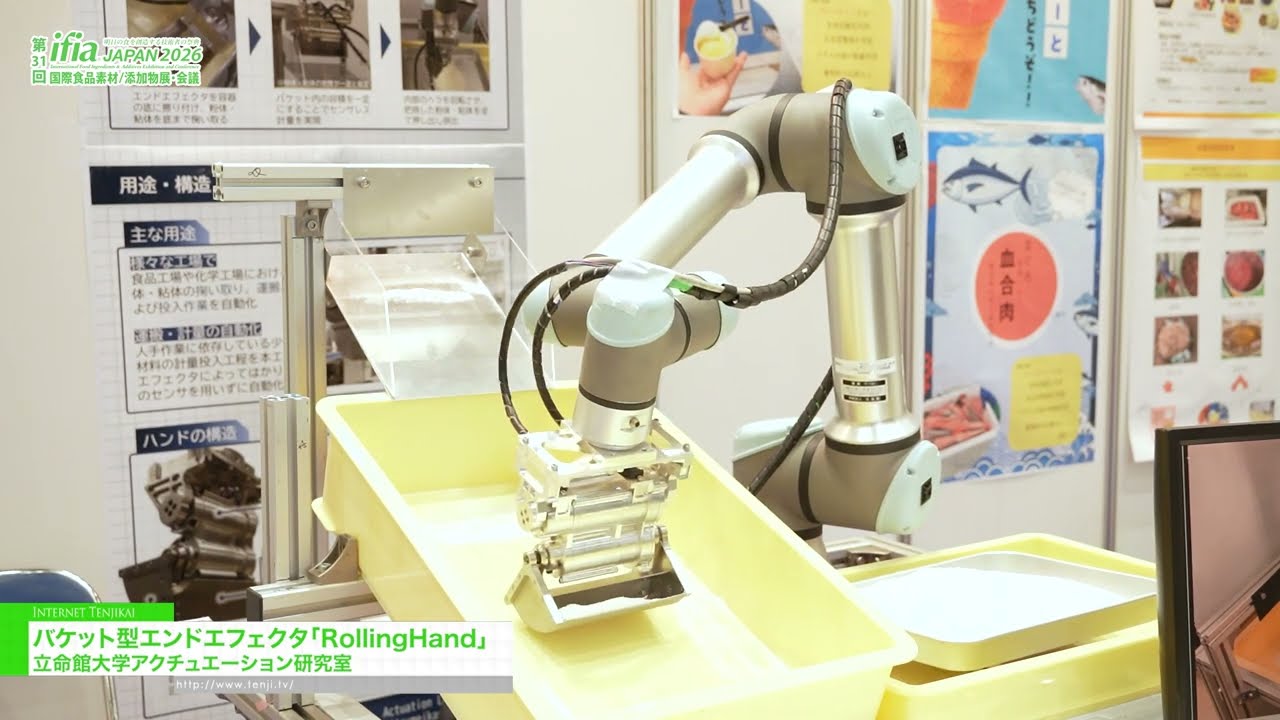
該研究室開發了一種採用柔性 Rolling Hand 結構的末端執行器,能夠從容器底部進行取料,並快速抓取固定數量的粉體,以提升食品工廠的自動化效率。
FAQ
Rolling Hand 的特色是什麼?
其柔性結構可讓裝置深入容器底部進行取料。
此技術主要應用於哪些領域?
主要應用於食品產業與化工產業的粉體原料投入製程自動化。
與傳統方式相比有何差異?
相較於使用計量設備的傳統方式,本技術能更快速地完成定量供給作業。
查看影片字幕
這裡是立命館大學加古川研究室。
此次我們開發了一種名為 Rolling Hand 的末端執行器,也就是機器人的手部裝置,用於抓取食品產業中的粉體等材料的固定用量,以下為大家介紹這項技術。
目前在食品產業與化工產業的原料投入製程中,例如粉體原料的投放,仍然有許多作業依賴人工,因此我們希望將其自動化。
本系統的一項特色是能夠從盛裝粉體的容器底部進行取料。
傳統工業機器人通常會避免與物體接觸,因為接觸被視為具有風險的行為,但我們所開發的機器手具有柔性結構,因此能夠深入容器底部完成取料。
另一項特色是能夠取得固定數量的原料。透過限制桶狀結構內部的容積,並加入由上方刮平的動作,我們參考人類使用茶匙與湯匙取料的方式,開發出這種末端執行器。
其作業方式為先取料、刮平,再取得固定量後投入加工設備。
與傳統利用計量設備進行定量計量的系統相比,本技術能夠更快速地完成作業。
目前我們正與一家利用此系統進行原料計量與出貨的創新企業合作,並持續推進商業化開發。
若您對這項技術或研究有興趣,歡迎造訪立命館大學 Actuation Laboratory 加古川研究室網站,以取得聯絡資訊。
感謝您的關注。
聯絡我們