EMESENT exibido em EXPO COMERCIAL UAV 2022.

ok, então este é o nosso mapa flutuante versão St uh esta é a versão mais recente que chegamos
fora de onde ele tem um Puck inclinado para baixo em um ângulo de 45 graus e o que é um slam
fora de onde ele tem um Puck inclinado para baixo em um ângulo de 45 graus e o que é um slam

baseado em lidar para que ele localize e mapeie simultaneamente ao mesmo tempo em que está girando e

coletando o ambiente 3D, também podemos usar esse ambiente para navegar na aeronave e

Ambientes com GPS negado, então somos realmente grandes em minerar lugares que a maioria das aeronaves não pode voar

como eles não têm uma solução de GPS, podemos usar o lidar real para navegar na aeronave

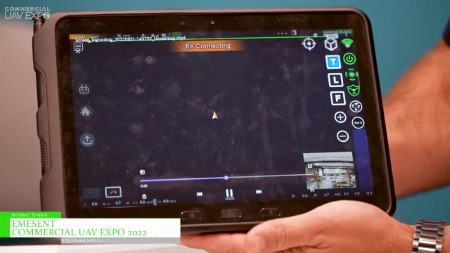
Tenho um exemplo que posso mostrar a você. Não sei se vai dar certo

então aqui estamos em um armazém onde temos um ambiente com GPS negado, iniciamos o hover

no tapete começamos a girar, ele está falando com a plataforma DJI m300 em que estamos voando

conseguimos nossa solução e podemos aplicar sem GPS e então podemos decolar e então trocamos

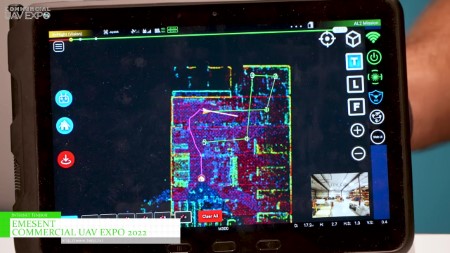
para nossa nuvem de pontos 3D ao vivo e começará a mostrar a área que está sendo construída

então, como você pode ver, isso faz parte do armazém, é uma nuvem de pontos muito esparsa, é apenas

o suficiente para dar uma ideia do que você está vendo e para onde voar, para que possamos entrar
e dar-lhe waypoints e podemos navegar por essa nuvem de pontos e ver para onde estamos olhando

para que possamos dar-lhe waypoints até que a aeronave vá voar de forma autônoma para esses pontos e

ao mesmo tempo, ele vai contornar obstáculos para chegar a esses pontos, então aqui temos
dado alguns pontos, mas poderíamos até colocá-lo em lugar nenhum e a aeronave sairia
dado alguns pontos, mas poderíamos até colocá-lo em lugar nenhum e a aeronave sairia

e, na verdade, entrará no modo de exploração, então avançarei um pouco enquanto colocamos esses

então, depois de colocá-los, é muito difícil ver aqui neste vídeo, mas você

ver um monte de cabos de extensão pendurados no teto, então
você verá a aeronave navegar em torno dele para chegar a esse ponto
você verá a aeronave navegar em torno dele para chegar a esse ponto

assim que atingir o primeiro Waypoint, ele irá para o próximo

e novamente está usando o ambiente que está construindo para encontrar o melhor caminho para ele

então ele se move para esses pontos diferentes à medida que se aproxima dessa área que você pode ver

que o ponto em que a nuvem começa a preencher mais porque tem mais dados, mais informações
então ele navega para encontrar o próximo Waypoint

e, à medida que vai para o último, haverá um pouco mais de obstáculos para onde ele quer chegar

mova-se ao redor deles

então ele navega de volta para aquele ponto naquele momento que eu assumo o controle da aeronave, trazê-lo de volta

para o local para pousar, todos podemos pousar automaticamente também sem o controle dos bastões

traga-o de volta, pare nossa verificação e, em seguida, tudo o que temos que fazer e virar isso na parte de trás

do mapa flutuante aqui, faça isso para que você possa ver, acabamos de abrir isso e há um

porta USB em que você insere seu pen drive e ele começará a fazer o download de todas as digitalizações que você tiver

lá que não foram baixados, então isso tem um armazenamento de 500 gigabytes dentro dele, então todos esses

as verificações permanecerão lá até você excluí-las, mas sempre que você precisar fazer uma nova verificação, basta

coloque o pen drive nos downloads automaticamente e então vamos ao nosso software para processá-lo

e a parte boa do software é que leva cerca de uma vez e meia a verificação
para processá-lo, portanto, se você fizer um voo de 10 minutos, provavelmente
para processá-lo, portanto, se você fizer um voo de 10 minutos, provavelmente

15 minutos para processar e ter sua nuvem de pontos completos que podemos exportar em Las Laz e57 uh

OBG eu acredito obj um em sim todos os formatos de arquivo que são necessários para entrar em todos os terceiros

softwares de terceiros e, a partir desse ponto, nós apenas limpamos e enviamos para o cliente