O Laboratório Kakogawa da Universidade Ritsumeikan está desenvolvendo tecnologia de mãos robóticas para automatizar processos de alimentação de materiais em pó nas indústrias alimentícia e química.
Nos ambientes de fabricação, as etapas de medição e alimentação de matérias-primas em pó ainda dependem fortemente do trabalho manual, tornando a redução da mão de obra e o fornecimento preciso de quantidades constantes desafios importantes.
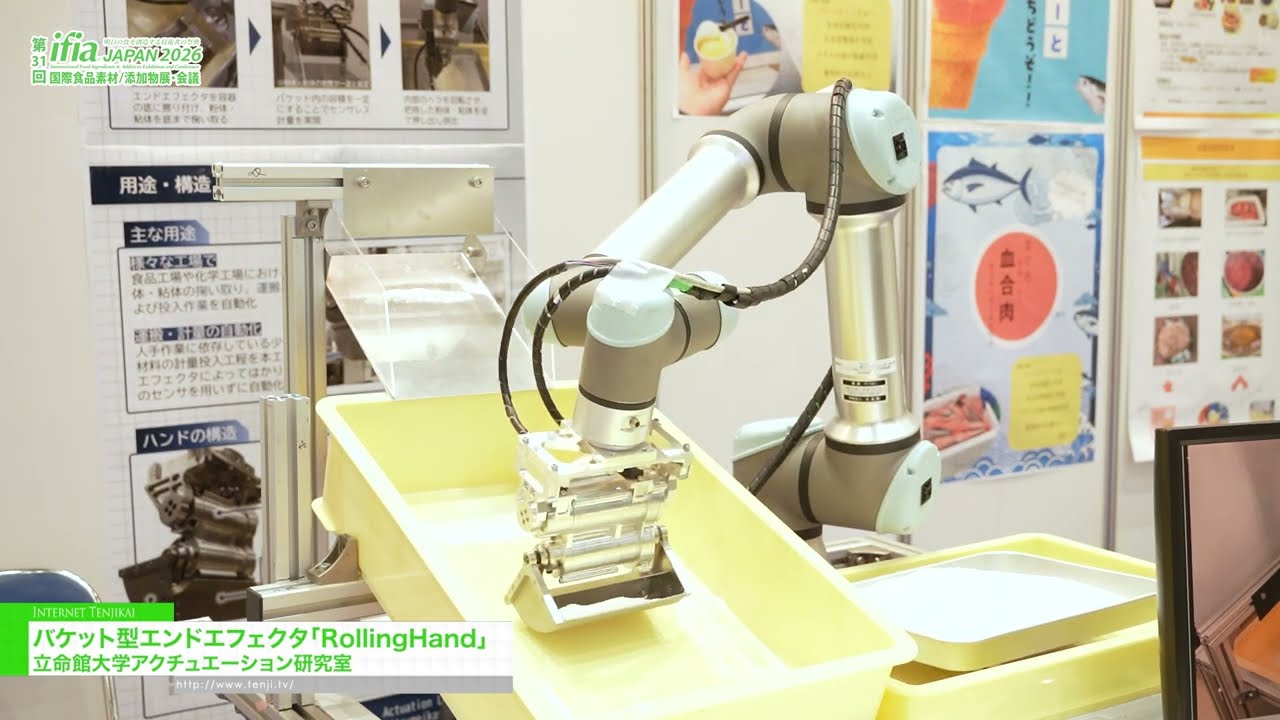
O laboratório desenvolveu um end effector baseado em uma estrutura flexível denominada Rolling Hand, capaz de recolher material do fundo de recipientes e capturar rapidamente uma quantidade predeterminada, com o objetivo de aumentar a eficiência da automação em fábricas de alimentos.
Desafios Resolvidos
FAQ
Quais são as características do Rolling Hand?
Para quais aplicações esta tecnologia foi desenvolvida?
Qual é a diferença em relação aos métodos convencionais?
Ver Transcrição do Vídeo
Somos o Laboratório Kakogawa da Universidade Ritsumeikan.
Desenvolvemos um end effector chamado Rolling Hand, a parte da mão de um robô projetada para capturar quantidades fixas de materiais em pó para a indústria alimentícia, e gostaríamos de apresentá-lo.
Atualmente, muitos processos de alimentação de matérias-primas, como pós utilizados nas indústrias alimentícia e química, ainda dependem do trabalho humano, e por isso buscamos automatizá-los.
Uma das características deste sistema é a capacidade de recolher material até mesmo do fundo de recipientes que contêm pó.
Nos robôs industriais convencionais, o contato com objetos costuma ser evitado por questões de segurança, mas a mão robótica que desenvolvemos possui flexibilidade suficiente para alcançar o fundo do recipiente e recolher o material.
Outra característica importante é a capacidade de capturar uma quantidade fixa. Ao limitar o volume interno de um recipiente em formato de balde e adicionar um movimento de nivelamento na parte superior, desenvolvemos este end effector inspirado na forma como as pessoas utilizam colheres de medida.
O material é recolhido, nivelado, dosado em uma quantidade fixa e então transferido para o equipamento de processamento.
Comparado aos sistemas convencionais que utilizam equipamentos de pesagem para medições quantitativas, este sistema consegue concluir a operação com maior rapidez.
Atualmente, estamos colaborando com uma empresa startup que utiliza sistemas semelhantes para medir matérias-primas destinadas à expedição, e seguimos avançando no desenvolvimento com foco na comercialização.
Se você tiver interesse nesta tecnologia ou iniciativa, visite o site do Kakogawa Laboratory no Actuation Laboratory da Universidade Ritsumeikan para obter informações de contato.
Muito obrigado.
Entre em Contato