
ईमेसेंटवाणिज्यिक यूएवी एक्सपो 2022 पर प्रदर्शित।

ठीक है तो यह हमारा होवर नक्शा है सेंट संस्करण उह यह नवीनतम संस्करण है जो हम आए हैं
45 डिग्री के कोण पर नीचे की ओर पकडें और यह क्या है एक स्लैम है
45 डिग्री के कोण पर नीचे की ओर पकडें और यह क्या है एक स्लैम है

आधारित लिडार इसलिए यह एक ही समय में स्थानीयकरण और मानचित्रण कर रहा है ताकि यह घूम रहा हो और

3D वातावरण को एकत्रित करके हम उस वातावरण का उपयोग विमान को नेविगेट करने के लिए भी कर सकते हैं और

GPS ने वातावरण से इनकार किया है इसलिए हम उन जगहों पर खनन करने में वास्तव में बड़े हैं जहां अधिकांश विमान उड़ नहीं सकते हैं

क्योंकि उनके पास GPS समाधान नहीं है, हम विमान को नेविगेट करने के लिए वास्तविक लिडार का उपयोग कर सकते हैं

मेरे पास एक उदाहरण है जो मैं आपको दिखा सकता हूं मुझे नहीं पता कि यह वहां ठीक से निकलेगा या नहीं

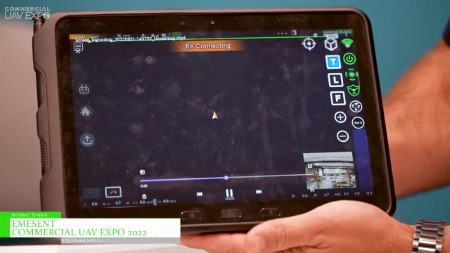
तो यहां हम एक गोदाम में हैं जहां हमारे पास जीपीएस से वंचित पर्यावरण है हम होवर शुरू करते हैं

मैट हम कताई शुरू करते हैं यह डीजेआई एम 300 प्लेटफॉर्म से बात कर रहा है जिस पर हम उड़ रहे हैं

हम अपना समाधान प्राप्त करते हैं और जीपीएस के बिना आवेदन करने में सक्षम होते हैं और फिर हम उतार सकते हैं और फिर हम स्विच कर सकते हैं

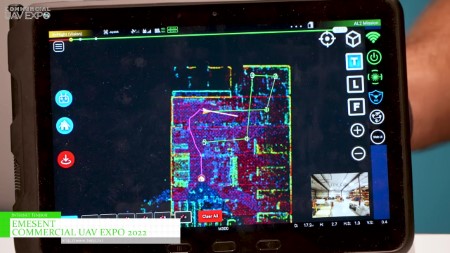
हमारे लाइव 3D पॉइंट क्लाउड पर और यह उस क्षेत्र को दिखाना शुरू करने जा रहा है जिसे बनाया जा रहा है

तो जैसा कि आप देख सकते हैं कि यह गोदाम का हिस्सा है यह एक बहुत ही विरल प्वाइंट क्लाउड की तरह है यह बस है

आप जो देख रहे हैं उसका अंदाजा लगाने के लिए पर्याप्त है और कहां उड़ना है ताकि अब हम वास्तव में अंदर आ सकें
और इसे वेपॉइंट दें और हम उस पॉइंट क्लाउड से नेविगेट कर सकते हैं और देख सकते हैं कि हम कहां देख रहे हैं

इसलिए हम इसे तब तक मार्ग-बिंदु दे सकते हैं जब तक कि विमान स्वायत्त रूप से इन बिंदुओं पर उड़ान न भर दे और

साथ ही यह उन बिंदुओं तक पहुंचने के लिए बाधाओं के चारों ओर नेविगेट करने जा रहा है, इसलिए यहां हमने
इसे कुछ बिंदु दिए लेकिन हम इसे कहीं भी नहीं डाल सकते थे और विमान बाहर चला जाएगा
इसे कुछ बिंदु दिए लेकिन हम इसे कहीं भी नहीं डाल सकते थे और विमान बाहर चला जाएगा

और यह वास्तव में एक्सप्लोरेशन मोड में चला जाएगा, इसलिए जैसे ही हम उन्हें डालते हैं, मैं थोड़ा तेजी से आगे बढ़ूंगा

इसलिए एक बार जब हम उन्हें रख देते हैं तो इस वीडियो को यहां नीचे देखना बहुत मुश्किल होता है लेकिन आप

विस्तार डोरियों का एक गुच्छा देखें जो छत के लिए नीचे लटका हुआ है
आप उस बिंदु तक पहुंचने के लिए विमान को उसके चारों ओर नेविगेट करते हुए देखेंगे
आप उस बिंदु तक पहुंचने के लिए विमान को उसके चारों ओर नेविगेट करते हुए देखेंगे

एक बार जब यह पहला वेपॉइंट पूरा कर लेता है तो यह अगले एक पर जाने वाला है

और फिर से यह उस वातावरण का उपयोग कर रहा है जो इसके लिए सबसे अच्छा मार्ग खोजने के लिए निर्माण कर रहा है

इसलिए यह इसके चारों ओर स्कूटर इन विभिन्न बिंदुओं पर आता है क्योंकि यह इस क्षेत्र के करीब आता है जिसे आप देख सकते हैं

कि बिंदु क्लाउड अधिक भरना शुरू कर देता है क्योंकि इसमें अधिक डेटा अधिक जानकारी है
तो फिर यह नेविगेट करता है अगला वेपॉइंट खोजने के लिए जाता है

और फिर जैसे-जैसे यह आखिरी तक जाता है, वहां कुछ और बाधाएं होती हैं जहां वह चाहता है

उनके चारों ओर घूमो

तो यह उस बिंदु पर वापस नेविगेट करता है उस समय मैं विमान का नियंत्रण लेता हूं इसे वापस लाता हूं

इसे लैंड करने के स्थान पर हम सभी ऑटो लैंड कर सकते हैं और साथ ही साथ लाठी के नियंत्रण के बिना भी

इसे वापस नीचे लाएं हमारे स्कैन को रोकें और फिर हमें बस इतना करना है और इसे पीछे की तरफ मोड़ना है

यहां होवर मैप के लिए इसे ठीक करें ताकि आप इसे देख सकें, हम इसे अभी खोलते हैं और एक है

यूएसबी पोर्ट जिसमें आप अपना थंब ड्राइव डालते हैं और यह आपके द्वारा किए गए किसी भी स्कैन को डाउनलोड करना शुरू कर देगा

वहां जो डाउनलोड नहीं किया गया है, इसलिए इसके अंदर 500 गीगाबाइट स्टोरेज है, इसलिए वे सभी

स्कैन तब तक वहीं रहेंगे, जब तक आप उन्हें हटा नहीं देते लेकिन जब भी आपको एक नया स्कैन करना होता है तो आप बस

थंब ड्राइव को स्वचालित रूप से डाउनलोड में चिपका दें और फिर हम इसे संसाधित करने के लिए अपने सॉफ़्टवेयर पर जाते हैं

और फिर सॉफ्टवेयर के बारे में अच्छी बात यह है कि स्कैन में लगभग डेढ़ गुना समय लगता है
इसे संसाधित करने के लिए यदि आप 10 मिनट की उड़ान करते हैं तो आप संभवतः इसके बारे में देख रहे हैं
इसे संसाधित करने के लिए यदि आप 10 मिनट की उड़ान करते हैं तो आप संभवतः इसके बारे में देख रहे हैं

संसाधित करने के लिए 15 मिनट और आपका पूरा बिंदु क्लाउड हम Las Laz e57 uh . में निर्यात कर सकते हैं

OBG मेरा मानना है कि obj um in हाँ सभी फ़ाइल प्रारूप जो सभी तीसरे में जाने के लिए आवश्यक हैं

पार्टी सॉफ्टवेयर और फिर उस बिंदु से हम इसे साफ करते हैं और इसे ग्राहक को भेजते हैं













